
Agama lizards are known to leap from horizontal surfaces to vertical walls. Similar to most of nature’s wonders, they have adapted an exceptional feature to accommodate their needs. In this week’s edition of Nature, fascinating research was published by scientists from the University of California-Berkeley explaining the natural marvel with one of physic’s fundamental laws.

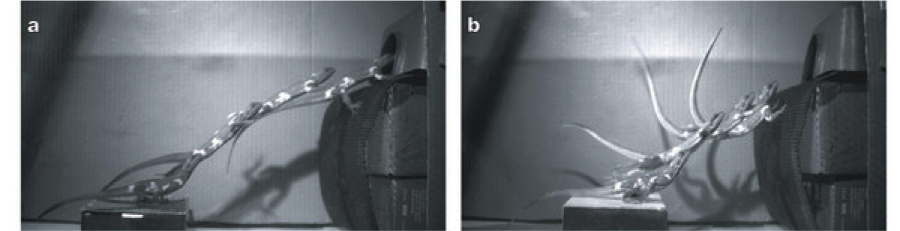
The researchers were investigating the overall capability and functionality of an agama lizard’s tail. The team of scientists designed a track to maximize the lizard’s speed when it was provoked to escape. In this case, the provocation was a light brushing of the lizard’s tail. Once the lizard began to run, it made an intermediate jump onto a vault which it used to launch itself onto a vertical wall. They used two different materials for the vault: sandpaper and glossy card stock. By changing the amount of friction between the lizard and the vault, the biomechanics of the jumping lizard changed to maximize its ability to leap to the vertical wall. After departing from the slippery surface, its tail and head curved in opposite directions to account for a slip at the time of launch. When jumping off the vault with a firm stance (sandpaper), significantly less tail-head curving action was required.
At home, you can try this yourself, take a long jump style leap at home on several different surfaces and note how your body changes. If you jump from carpet, a recently waxed floor, ice, grass, or sand, your body will naturally react so you have the best shot at maintaining your balance and maximizing your distance (be careful). We just don’t have awesome tail for extra balance because most of us don’t need one, except for maybe those folks that do parkour.
The lizard’s reaction is attributed to a law of physics, in this case it is the conservation of angular momentum. The law states angular momentum remains constant unless acted on by an external force. In this case, the lizard jumping forward rotates its head counterclockwise, while its tail curls in a clockwise direction. The opposite movements ensure that angular momentum is conserved while the lizard is jumping. (Notice the torque of the lizard’s body in picture [b])

Again, this can be equated to something you can do at home. If you put your feet so they are in line with each other and stand on your toes, immediately your balance is tested. To ensure that you remain standing allow your arms to come out to your side to assist with your balance. The natural motion of your body ensures that your angular momentum is maintained while testing your balance.
Next the researchers proposed the obvious question: how does the effectiveness of the agama lizard’s tail compare to that of a dinosaur and a robot? So naturally, they performed a similar experiment with a robot and a Velociraptor dinosaur model. The robot was essentially a toy truck that they altered to have a tail. They used two different tails to monitor their overall effectiveness. One robot tail was 50% the body length and 5% of the body mass (Robot 1), while the other tail was 200% the body length and 10% the body mass (Robot 2). The Velociraptor model was made similar to a previous work’s evolutionary robotics model (Sellers, W. I.; Manning, P. L. Proc. Royal Soc. B 2007, 274, 2711. – a topic for another day). What tail do you think was the most effective?
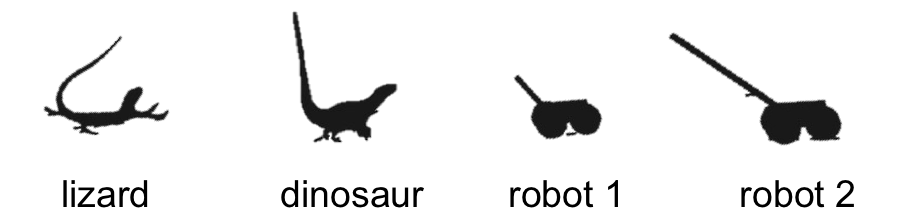
After performing many trials and solving a complicated, mathematical algorithm, they determined the most effective tail was that of Robot 2. Second place belonged to the Velociraptor model. Rounding out the bottom was the agama lizard with third place. Finishing last was Robot 1 that was configured with the smallest tail. The present research demonstrated science’s ability to be fun, creative, and multi-disciplinary. Can you think of anything more kickass than experimenting with leaping lizards, dinosaurs, and robots in the name of science?
Full details of this work can be found here: Libby, T.; Moore, T. Y.; Chang-Siu, E.; Li, D.; Cohen, D. J.; Jusufi, A.; Full, R. J. Nature 2012, 481, 181-184.



What the hell kind of environment can this lizard inhabit that makes it an evolutionary advantage to have a bright BLUE body and a bright ORANGE head??
At the moment, the best I can come up with is that any potential predator looks at it and goes:
“WTF?! I am NOT eating that!”
I am going with Gainesville, FL where everything is blue and orange.
It’s only the males that are this brightly colored, and even so are only very brightly colored during the breeding season if I’m not mistaken. Female rainbow agamas (also known as redhead agama or red headed rock agama)and juveniles are brown. So I’m guessing the color is for attracting females. After all, sexual selection has done stranger things than this.
Actually this particular lizard is a holdover from the 80s. I mean, nobody wears an all-denim outfit like this any more. So yes, impressive but where is the mall hair to go with it, huh? Honestly.
BTW, the senior author on this is the same dude that was putting jetpacks on roaches.
http://skepchick.org/2012/01/roaches-with-jet-packs/
I believe they’re capable of changing colours to some limited degree, aren’t they?
I have a friend who has a frankly enormous pet iguana (about four and a half feet long) and he* can change his colour from a lovely bright green to a sort of sunburned orange.
* The iguana, not my friend. She, my friend, is a person and not able to change her skin colour without the aid of cosmetics.
She doesn’t tan? She’s an albino?
Or you meant colour change as opposed to a change in hue?
Yes, they can change their color. The colors become brighter when they are agressive (eg. during conflicts over territory; male common agamas can be very territorial) and their color also changes with temperature.